Gekoni vypadají jako ještěrky, jen s tím rozdílem, že dokážou obdivuhodně hbitě běhat nejen po kolmých hladkých plochách, ale i po stropě. Za to, že si nemusejí dělat starosti s přitažlivostí, vděčí sílám, které se po jejich objeviteli nazývají van der Waalsovy. Zvířátka totiž mají na tlapkách „kartáčky“ s mnoha chloupky pokrytými fosfolipidy. Jejich molekuly se vyznačují trvalou polarizací a při kontaktu vyvolávají opačnou polarizaci molekul v podložce. Díky těmto dotekem vyvolaným sílám tlapičky k povrchu přilnou a umožňují gekonům lézt i po hladké ploše hlavou dolů.
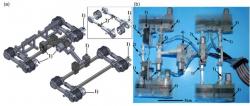
Technici z University Simona Frasera v Burnaby vytvořili robota a nazvali ho TBCP-II. Je výstupem projektu Timeless Belt Climbing Platform, což by se dalo přeložit jako Nekonečná pohyblivá pásová platforma. Samostatné jedno vozítko má hmotnost pouhých 240 gramů. Jak ale z názvu vyplývá, lze jej spojovat s dalšími a vytvářet tak delší i širší celky pro přepravu i rozměrnějšího a hmotnějšího nákladu.
Pásy + klouby
Od jiných robotů, které si rovněž kladou za cíl šplhat po hladkých stěnách, má nová koncepce - kromě možnosti sestavování jednotlivých modulů do větších celků - ještě další přednost. Kloubové spojení umožňuje překonávat i zalomení stěn, přelézat ze svislé stěny na strop a opačně. Zvládá tedy jak vnitřní, tak vnější pravoúhlé zalomení. To zatím roboty pohybující se na končetinách jako gekoni, na rozdíl od svých živých vzorů, nedovedou. Stejně nemotorné jsou v tomto směru i roboty vybavené přísavkami. Poslední hit – robot na kolečkách využívající nadzvukovou rychlostí proudící vzduch k vyvolání podtlaku (princip Bernoulliho trubice – podrobnosti zde) - již dokáže překonat i dveřní spáry na skříních, ale přechod stěna - strop je na něj také moc.

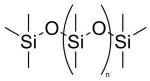
Pásy, které imitují povrch gekonových tlapiček jsou vyrobeny ze „silikonu“, konkrétně polydimethylsiloxanu (vžila se pro něj zkratka PDMS). Tento polymerovaný organosilikon dovoluje na povrchu vytvořit ne zrovna chloupky, ale houbovité výčnělky s průměrem okolo 17 mikrometrů a výškou 10 mikrometrů. To jsou optimální rozměry, při nichž se mezi polarizovanými molekulami pásu a podložky vytvoří van der Waalsovy síly dostatečně silné na to, aby stroj na hladkém povrchu udržely. I když houbovitá struktura není tak efektivní jako mikrovlásky gekoních tlapiček, pás tento hendikep kompenzuje větší styčnou plochou.
Vedoucí kolektivu Jeff Krahn původně také začínal s koncepcí „kráčejících“ robotů. Již je ale zavrhl, také proto, že „odtrhávání přilepeného“ pásu od podložky je snadnější, než když se stroj snaží napodobit kroky. Při odtrhávání celé tlapky se systém vždy částečně destabilizuje a právě při těchto manévrech umělí gekoni, kteří nemají pro vyrovnávání přítlaku v dobách "nouze" mrskající se ocas, rádi ze stěny padají. Pás se odlupuje jen v úzké linii a to dovoluje pohyb mnohem rychlejší a bezpečnější. Po svislé okenní tabuli se pásový přepravník dokáže posouvat rychlostí 3,4 centimetrů za sekundu (dva metry za minutu, 120 metrů za hodinu). Čím větší je styčná plocha, tím zajímavější bude přepravovaná hmotnost nákladu.
Nynější verze pásového přepravníku je již vybavena celou řadou senzorů. Zjišťují charakter okolí a údaje předávají do řídící jednotky. Ta disponuje částečnou autonomií a vybírá nejvhodnější z možných tras vedoucích požadovaným směrem. I když pravoúhlé zlomy již překážku nepředstavují, přechody ze zdi na okno a opačně zatím ano, často jsou na nich záludnosti v podobě říms a tvarovaných ozdobných lišt. Plánované programové a konstrukční úpravy robota by se ale s nimi měly vypořádat. A tak "TBCPové" prý již brzo budou schopni lézt po budovách a nakukovat nám do oken.
Novozélandský kolečkový robot s přísavkami, v nichž podtlak vytváří proud vzduchu o rychlosti Mach 3.
Kam se hrabou na gekona, kterému můžete cestu „namydlit“, a i když uklouzne, ocas ho zachrání.

Prameny:
Simon Fraser University Burnaby
Smart Mater. Struct. 20 115.021. https://iopscience. ... 20/11/115021
PLoS ONE