

Poté, co ho naučili, jak se drží luk a šíp, začal se humanoidní robot iCub učit nové dovednosti lukostřelby sám. V samo-tréninku je tak úspěšný, že terč začne zasahovat po osmi pokusech.
Výuku robota zajišťuje algoritmus ARCHER (Augmented Reward Chained Regression), který byl upraven právě pro potřeby střelby,
iCub robot je open-source robotická platforma. Má podobu 3,5letého dítěte. Jeho mechanismus se vyznačuje 53 stupni volnosti a proto se v odborné literatuře někdy označuje termínem 53-DOF iCub.
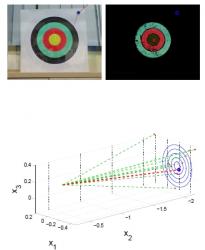
Při pokusu se střelbou byla jeho vzdálenost od cíle 3,5 metru. Ručně mu bylo nastaveno uchopení luku a postavení ukazováčku před prvním uvolněním tětivy. Pozice levé a pravé paže kontroloval vektorový regresní algoritmus. Zkušenosti z každého pokusu dolaďovaly postavení rukou robota, jejich pohyby řídil inverzní kinematický řadič. Zásahy evidovala kamera a systém zjišťoval, kde hrot šípu narazil. Filtrování barvy na barevnost terče a přiřazování významu jednotlivým zásahům sloužilo jako zpětná vazba pro algoritmus.
Algoritmus vyvinul Dr. Petar Kormushev z Italského institutu technologie (IIT). Podrobnosti bude prezentovat v prosinci tohoto roku na konferenci Humanoids 2010, která se bude konat v Nashvillu (USA).
Pramen: Learning the skill of archery by a humanoid robot iCub