Mraveniště nás děsí anebo třeba fascinují, každopádně nás ale tahle podivuhodná hnízda mravenců jen málokdy nechají chladnými. Jak asi fungují příbytky postavené a udržované blanokřídlým hmyzem se zvláštními příbuzenskými vztahy? A jak se jednotliví mravenci orientují v bludišti chodeb, zaplavených soukmenovci? Detailní výzkum v mraveništích není úplně jednoduchý a mravenci ne vždy ochotně spolupracují. Co kdyby si ale na mravence v mraveništi zahráli důmyslní miniaturní roboti?

Právě to napadlo Simona Garniera z Výzkumného centra kognitivního chování živočichů, francouzského CNRS v Toulouse a jeho spolupracovníky. Na první pohled šílenou myšlenku přetavili do zajímavého výzkumu, při němž si určitě užili i hodně legrace. Ve své studii se zaměřili na chování mravenců argentinských (Linepithema humile), kteří sice původně pocházejí z jižní Ameriky, ale v současné době se invazně šíří v mnoha částech světa. Ti se za normálních okolností orientují chemicky, pomocí feromonů.
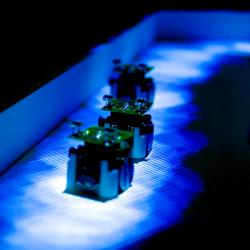
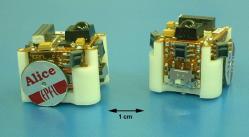
Garnier a spol. si připravili skupinu miniaturních pohyblivých robotů Alice velikosti kostky cukru, které před časem vyvinuli ve Švýcarském federálním technologickém institutu v Lausanne (EPFL), kvůli výzkumu kolektivní inteligence. Mikroroboti byli vybaveni infračervenými detektory, s jejichž pomocí se vyhýbali překážkám a také poznávali start a cíl své cesty. Kromě toho nesli i dva senzory citlivé na světlo, s nimiž sledovali světelný gradient. Ten v experimentech napodoboval feromony reálných mravenců. Úkolem umělých mravenců bylo nalézt cestu z hnízda na jeho okraj, k simulovanému zdroji potravy.

Robotičtí mravenci se nejprve octli v chodbách bludiště bez světelného gradientu. V takové situaci se pohybovali náhodně, ale zároveň v jednom všeobecném směru. Pokud narazili na světelný gradient představující feromony, vydali se prostě ve směru, kterým gradient ukazoval. Postupně vyšlo najevo, že mikroroboti nepotřebují být naprogramováni k rozpoznávání a analýze křižovatek cest, po nichž se pohybují. Úplně jim stačilo sledovat stopy světelných feromonů anebo se náhodně pohybovat všeobecným směrem.
Reální mravenci argentinští nemají příliš dobrý zrak a pohybují se dost rychle na to, aby na každé křižovatce mohli zapřemýšlet, kam asi mají odbočit. Vše nasvědčuje tomu, že ani oni nepotřebují k nezbytné orientaci v systému chodeb a pěšin žádné složité poznávací, kognitivní schopnosti. Zároveň se ukazuje, že v jejich orientaci hraje klíčovou roli geometrické uspořádání sítě cest.
Video: Evoluce altruistické kooperace u robotů Alice:
Literatura
SpaceDaily 2.4. 2013, PLoS Computational Biology 9: e1002903.
Boston Dynamics skórují velmi lidskými pohyby robota Atlase
Autor: Stanislav Mihulka (21.03.2025)
Japonská nanovideohra je zázrakem nanotechnologií
Autor: Stanislav Mihulka (27.02.2025)
Protoclone je velmi zneklidňující humanoidní robot se „svaly a kostmi“
Autor: Stanislav Mihulka (22.02.2025)
Milrem Robotics vyvinuli osmikolového robotického obrněnce HAVOC
Autor: Stanislav Mihulka (14.02.2025)
Všesměrová samovyvažující „motorka“ jezdí po dvou koulích
Autor: Stanislav Mihulka (27.01.2025)
Diskuze:


