
Kredit: Mark Cutkosky/Stanford University
9. až 13. května se v čínské Šanghaji konala velká mezinárodní konference o robotice a automatizaci ICRA 2011 (International Conference on Robotics and Automation). Toto zejména pro kluky každého věku nesmírně zajímavé téma spojuje vážnou vědu, techniku, elektroniku s kreativní hrou. Současní roboti a současné roboty dokážou už ledacos. Třeba se i pohybovat po kolmých rovných plochách z různých materiálů. Některé se snaží konkurovat gekonům a nespadnout ani ze stropu. Fyzikálních principů, které jim to umožňují, je několik. Jak byste takový úkol řešili vy?
Existují již speciální, husté krátké vlásky na pacičkách gekonů připomínající přilnavé povrchy, které fungují na principu elektrostatických sil (poslední video pod článkem). Přírodu jsme v tomto směru zatím nedoběhli, směr se však zdá být nadějný, i když má své limity. I různé přísavky využívající podtlak slabého vakua by se daly použít, ale ani ony nenabízejí universální řešení pro každý povrch. Existuje také opačná možnost jak zajistit dostatečnou přilnavost k povrchu – vzduch neodsávat, nevytlačovat, ale vhánět. Pokus na následujícím několikasekundovém videu napoví a připomene jeden ze základních fyzikálních poznatků:
Zrychlené proudění nestlačitelné kapaliny a za jistých podmínek i stlačitelného plynu má za následek snížení tlaku. Je to jeden z projevů zákona zachování energie. Umožňuje letadlům létat a malému robotu zrozenému v laboratoři na novozélandské Universitě v Canterbury jezdit po kolmých rovných plochách ze skla, kovu, dřeva nebo pokrytých kachličkami či tkaninou. Nedělají mu přitom problém spáry a mezery například na dvoukřídlových dveřích:
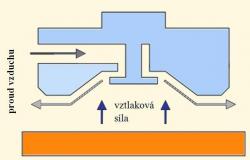
To co malému zařízení na dvou kolečkách umožňuje překonávat gravitaci a drží ho na zdi, je podtlak vytvořený vzduchem proudícím nadzvukovou rychlostí z velmi úzkého kruhového otvoru na spodní straně dvou přísavných kotoučků. Jsou upevněny v přední a zadní části robota, na ose kolmé k nápravě dvou koleček, pomocí kterých se pohybuje. Pod oběma přísavkami fouká z kruhové dýzy vzduch nadzvukovou rychlostí Mach 3, což při nulové nadmořské výšce odpovídá rychlosti asi 1 021 m/s. To vytváří vztlakovou sílu táhnoucí podložku k přísavkám. Ty se samozřejmě podkladu nedotýkají, ale vznášejí se 25 mikrometrů (tisícin milimetrů) nad ní.
| Základní princip přítlačného kotoučku vytvářejícího podtlak na základě Bernoulliho principu. |
Konstrukce přítlačného kotoučku. |
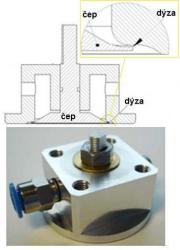
Jestli prototyp předváděný novozélandským týmem na konferenci ICRA 2011 je stejný jako ten, který popisuje odborný článek z roku 2008, pak když je kruhová regulovatelná dýza s průměrem 6 mm v spodní části přísavného kotouče nastavená na šířku otvoru 0,1 mm, při spotřebě okolo 52 litrů vzduchu za minutu vháněného pod tlakem 5 atmosfér má vznikající přítlačná síla na hladkém skleněném povrchu hodnotu až 12 Newtonů. Za těchto podmínek je 234gramový robot schopný se pohybovat i s další půlkilogramovou zátěží. Podle autorů systém bezkontaktních přísavek využívajících Bernoulliho princip je v porovnání s jinými testovanými způsoby zajištění dostatečné přítlačné síly na kolmých plochách ten nejefektivnější.
Video: Robotický gekon z roku 2006
Zdroje: ICRA 2011, stránka IEEE , odborný článek
Diskuze:


